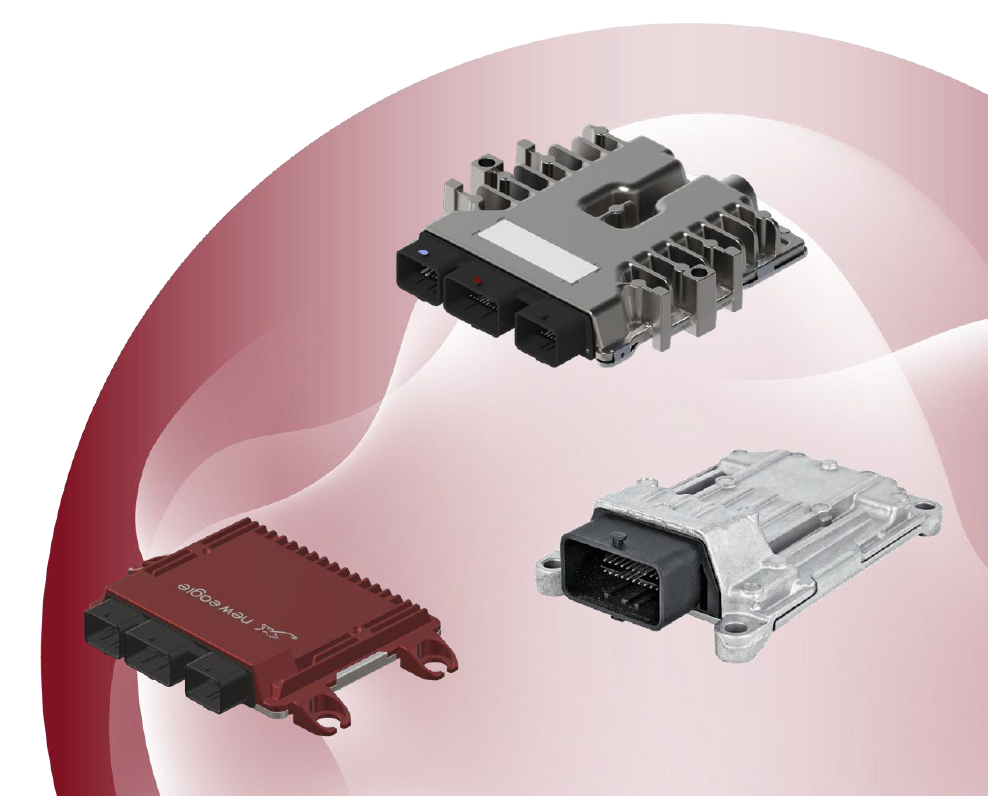
New Eagle Control Solutions
Production-Ready, Customizable Electronic Control Units
New Eagle’s Raptor™ ECUs are production-ready, customizable embedded controllers designed for rapid development and scalable industrial deployment.
They provide an open-ECU development environment that allows engineers to combine native Simulink blocks with Raptor blocks to accelerate both prototyping and fleet-level projects.
These ECUs serve a wide range of applications—including electric and hybrid vehicles, autonomous systems, industrial equipment, and defense—while meeting automotive-grade standards such as ISO 26262.
Thanks to partnerships with Tier-1 suppliers, New Eagle delivers high-quality, safety-ready controllers with competitive pricing and short lead times.
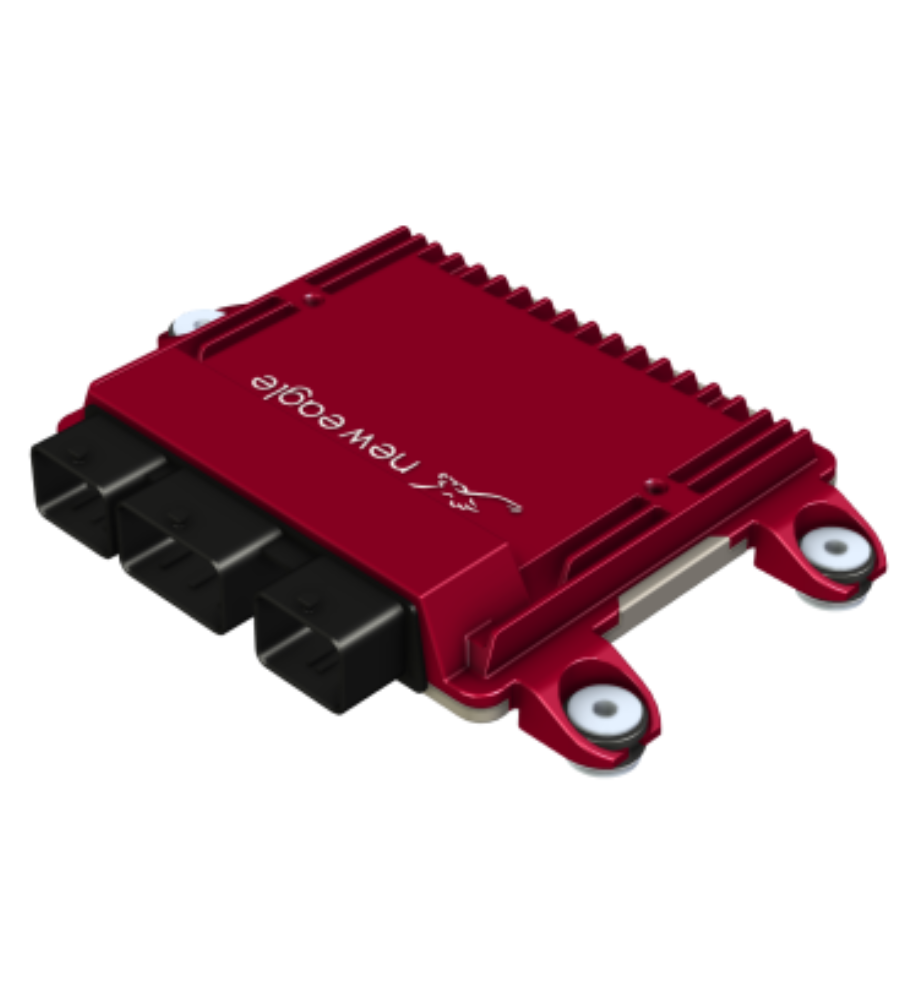

RCM112
The RCM112 is a high-performance, general-purpose controller designed for applications needing strong processing, extensive outputs, cybersecurity, and functional-safety capability. It features a 200 MHz ASIL-D-capable processor, rugged design for 12/24 V systems, and broad connectivity including 5 CAN FD buses, 2 LIN channels, automotive Ethernet, and SENT inputs.
It offers rich I/O (analogue, digital, frequency, wake inputs, high-/low-side and half-bridge drivers), plus an integrated 6-axis Inertial Measurement Unit for advanced control and dynamics. Its embedded cybersecurity features help safeguard the controller against tampering and unauthorized access.
Paired with the Raptor MBD toolchain (MATLAB/Simulink), it accelerates development, testing, and calibration for EVs, autonomy, and complex mechatronic systems.
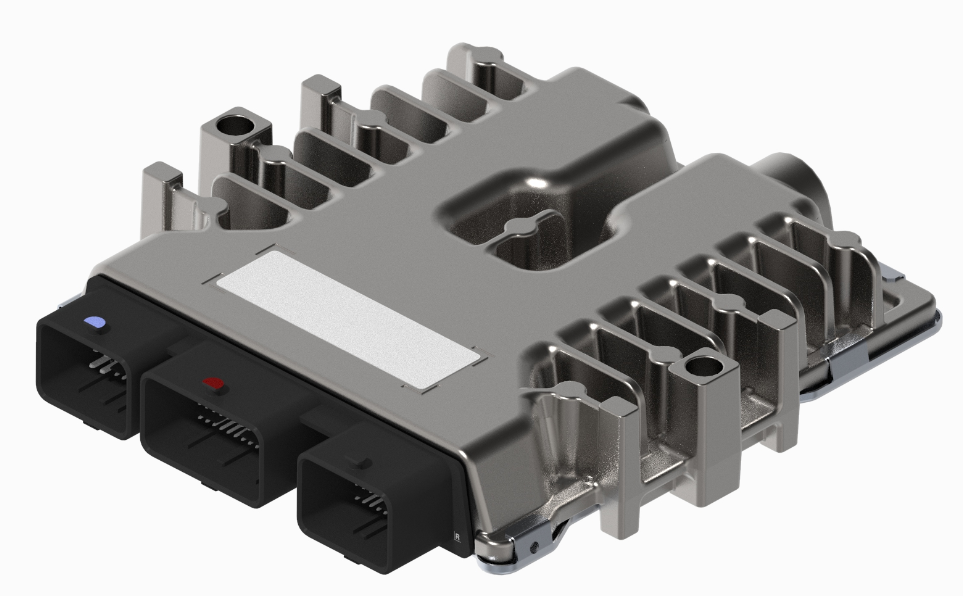
GCM112 - JOHN DEERE M411
The GCM112 is a John Deere M Series Raptor Control Module, a programmable ECU for 12V/24V mobile systems.
Designed for rugged, precise operation, it offers flexible I/O, computing options, and a common architecture suited to diesel/gas engines, hydraulics, cab/body control, power distribution, powertrain, implements, and lighting.
M Series controllers ensure reliable performance in extreme temperatures, harsh chemicals, and direct exposure to water, dust, and debris. Built with proven design libraries, they support extensive I/O monitoring, load control/protection, and multiplex networking via CAN, SAE J1708, and SAE J1939.
The module offers high-side driver outputs capable of up to 3 A continuous (6 A peak) per channel in PWM mode.
GCM111
The GCM111 is a compact yet powerful general-purpose controller designed for demanding mobility and off-highway applications. Equipped with 2 CAN buses, extensive analog, digital, frequency, and SENT inputs, plus low-side, high-side, and H-bridge outputs, it offers versatile interfacing for a wide range of subsystems. Its MPC5744P 200 MHz processor provides strong computational performance for advanced control strategies, while support for 8–32 V systems ensures compatibility with both 12 V and 24 V platforms. Fully integrated with the Raptor MBD toolchain, the GCM111 enables rapid development, testing, and deployment of application software. Its rich I/O set, fast processing, and rugged sealed housing make it ideal for functions such as powertrain control, hydraulic actuation, thermal management, or vehicle-level coordination.

GCM48
The GCM48 is a rugged general-purpose controller featuring 6 CAN buses, 2 LIN Masters, and 1 LIN Slave, plus flexible analog, digital, and frequency inputs, a wake input, low-side drivers, and an H-bridge output. Powered by a 64 MHz MPC5605B processor and operating on 8–16 V systems, it supports rapid development through the Raptor MBD toolchain. Its rich I/O and multi-bus connectivity make it well-suited for gateway, body, or subsystem control in demanding mobile and off-highway environments.
Raptor Toolchain
Raptor-Dev is the primary software development tool within the Raptor ecosystem. Integrated into Simulink, it enables engineers to design control algorithms graphically using a dedicated library of blocks that automatically handle hardware interfaces, real-time task scheduling, and optimized code generation. By leveraging a Model-Based Design approach, Raptor-Dev accelerates development cycles, reduces errors associated with manual coding, and supports rapid iteration on control strategies. It is ideally suited for electric, hybrid, off-highway, and software-defined vehicle projects that require fast, robust, and reliable control development.
Raptor-Cal is the calibration and diagnostic tool used to adjust parameters in real time on Raptor controllers and observe system behavior during operation. Fully compatible with calibration files from Raptor-Dev, it enables quick tuning of maps, constants, and strategies without stopping the system. With intuitive data visualization, table editing, and logging capabilities, Raptor-Cal provides an efficient environment for optimizing and validating control applications.

Request a Quote
TeKshift can assist with system development and control software on the Control Units above, but you can also simply order the New Eagle Control Units out of the box. Please fill out the form below and we’ll make you a competitive quote!